
Математическое моделирование линейных динамических стационарных систем и анализ их динамических и частотных характеристик в ППП ControlSystemToolboxСКМ Matlab
Цель работы: Ознакомление
с динамическими и частотными характеристиками систем автоматического управления
(САУ) и получение навыков интерактивного исследования линейных динамических
моделей.
1 Постановка задачи
В качестве объекта исследования выбраны линейные
(линеаризованные) динамические стационарные системы управления с одним входом и
одним выходом. При этом модель одномерной САУ задана в виде комплексной
передаточной функции, записанной как отношение полиномов
.
Необходимо:
- Определить полюса и нули передаточной функции
, .
- Записать дифференциальное уравнение, определяющее
функционирование САУ. - Построить графики переходной и импульсной характеристик:
h(t), w(t).
- Построить логарифмические частотные характеристики
L (w
).
- Построить частотный годограф Найквиста
W(iw ), w = .
6. Построить карту нулей и полюсов передаточной функции (при
выполнении анализа в режиме LTIVIEW).
2 Сведения по работе с ППП Control System Toolbox
2.1 Для выполнения лабораторной работы используется
пакет прикладных программ (ППП) Control System Toolbox (CST). ППП предназначен для работы с LTI-моделями
(Linear Time Invariant Models – линейными инвариантными моделями) технических
систем и систем управления.
MatLab позволяет
выполнить требуемый анализ несколькими способами:
— в интерактивном режиме, задавая команды ППП в
командном режиме из Command Window ;
— в программном режиме, организовав m-файл
или пользовательскийGUI-интерфейс;
— используя графический интерфейс ППП CST, который называется
LTI viewer;
— в режиме визуального моделирования пакета Simulink, создав файл моделирования Model.
Выбор способа анализа при решении прикладных
инженерных задач моделирования определяется пользователем исходя из особенностей
постановки задачи. При этом сложные и ответственные системы рекомендуется
моделировать в различных режимах и сравнивать результаты моделирования.
В работе необходимо последовательно изучить и использовать
все четыре указанные способа анализа.
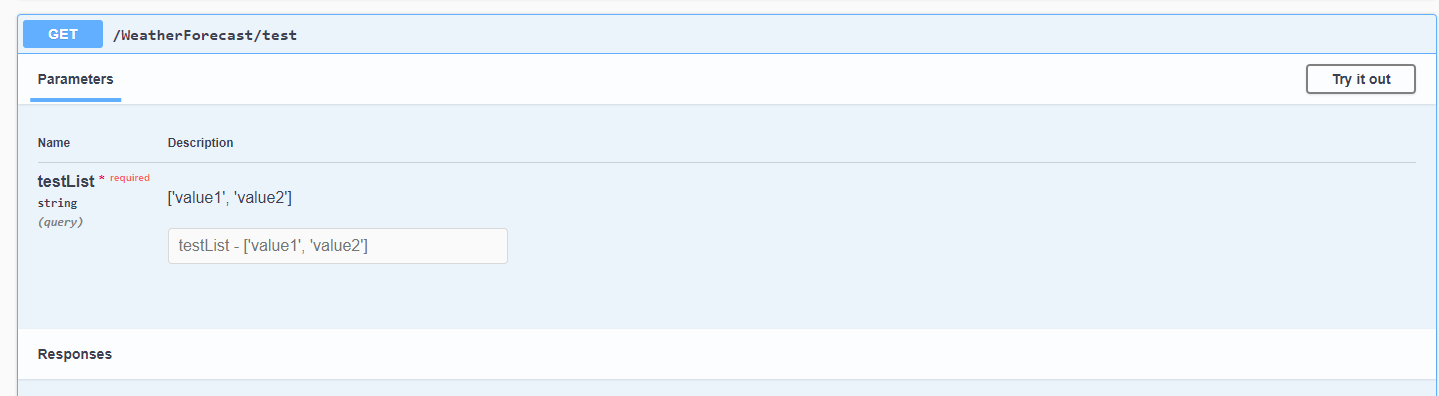
В ППП Control System Toolbox
имеется тип данных, определяющих динамическую систему в виде комплексной
передаточной функции. Синтаксис команды tf,
создающий в интерактивном режиме из Command Window LTI-систему
с одним входом и одним выходом в виде передаточной функции:
>> W = tf([bm, …, b1, b],
[an, …, a1, a])
bm, …, b1– значения коэффициентов
полинома В числителя передаточной функции,
an, …, a1– значения коэффициентов
полинома A знаменателя.
В результате в переменную W записывается LTI-система в виде передаточной
функции. Коэффициенты можно разделять запятой или знаком пробела.
В окне вывода Workspace можно просмотреть созданную переменную.
Ниже показан пример создания двух LTI-систем с одинаковыми передаточными функциями,
которые записаны в переменные W и
H:
>> W = tf ( , )
Transfer function:
s + 3
———————
5 s^3 + 7 s^2 + s + 2
>> H = tf ( ,
)
Transfer function:
s + 3
———————
5 s^3 + 7 s^2 + s + 2
2.2 Интерактивный режим моделирования линейных динамических стационарных
систем
Для выполнения работы необходимо использовать команды, приведенные в таблице
1.1.
![Импульсивный ответ содержание а также математические соображения [ править ]](https://fuzeservers.ru/wp-content/uploads/e/f/8/ef838b0744a2de5e23d78403bebf5f3c.png)
Таблица 1.1. Основные
команды ППП Control System Toolbox
|
Синтаксис |
Описание |
|
pole(<LTI-объект>) |
Вычисление полюсов передаточной функции |
|
zero(<LTI-объект>) |
Вычисление нулей передаточной функции |
|
step(<LTI-объект>) |
Построение графика переходной характеристики |
|
impulse(<LTI-объект>) |
Построение графика импульсной характеристики |
|
bode(<LTI-объект>) |
Построение логарифмических частотных характеристик (диаграммы Боде) |
|
nyquist(<LTI-объект>) |
Построение частотного годографа Найквиста |
Пример применения команды step:
>> step(W)
Здесь W – передаточная функция технического объекта,
созданная по команде tf.
Для определения корней полиномов степени k, может применяться команда
MATLAB
roots(P),
которая, в качестве аргумента P получает матрицу коэффициентов
полинома [pk, …, p].
Приведённые выше команды могут быть организованы
в программный фрагмент, записаны в m-файл
и затем запускаться на выполнение, как программа.
2.3 Использование графического интерфейса ППП CST – LTI viewer
Использование графического интерфейса ППП CST – LTI viewer
осуществляется вызовом команды из Command Window:
>> ltiview
В результате на экран дисплея будет выведено окно LTI viewer.
![]()
Далее необходимо указать, какой LTI
объект необходимо использовать для анализаFile
-> Import -> W
-> OK
Определение [ править ]
Дискретное время КИЙ — фильтр прямой формы порядка N . Верхняя часть представляет собой N- ступенчатую линию задержки с N + 1 ответвлениями. Каждая единичная задержка является оператором z −1 в обозначении Z-преобразования .
Дискретное время КИЙ — фильтр решетки-форма порядка N . Каждая единичная задержка является оператором z −1 в обозначении Z-преобразования .
Для причинного КИХ-фильтра с дискретным временем порядка N каждое значение выходной последовательности представляет собой взвешенную сумму самых последних входных значений
- yпзнак равнобИксп+б1Иксп-1+⋯+бNИксп-Nзнак равно∑язнак равноNбя⋅Иксп-я,{\ Displaystyle {\ begin {align} y & = b_ {0} x + b_ {1} x + \ cdots + b_ {N} x \\ & = \ sum _ {i = 0} ^ {N} b_ {i} \ cdot x , \ end {выровнено}}}
где
- Иксп{\ textstyle х } входной сигнал,
- yп{\ textstyle y } выходной сигнал,
- N{\ textstyle N}- порядок фильтрации; й -порядок фильтр имеет условия на правой сторонеN{\ textstyle N}N+1{\ textstyle N + 1}
- бя{\ textstyle b_ {i}}это значение импульсного отклика на I» й момент времени для из -порядок КИХ — фильтра. Если фильтр является КИХ-фильтром прямой формы, то это также коэффициент фильтра.≤я≤N{\ textstyle 0 \ leq я \ leq N}Nth{\ textstyle N ^ {\ text {th}}}бя{\ textstyle b_ {i}}
Это вычисление также известно как дискретная свертка .
В этих терминах обычно упоминаются как ответвления , на основе структуры линии задержки с ответвлениями , которая во многих реализациях или блок-схемах обеспечивает задержанные входные данные для операций умножения. Например, можно говорить о фильтре 5-го порядка / 6-ти отводного сигнала.Иксп-я{\ textstyle х }
Импульсная характеристика фильтра, как определено, отлична от нуля в течение конечной продолжительности. Включая нули, импульсная характеристика представляет собой бесконечную последовательность
- часпзнак равно∑язнак равноNбя⋅δп-язнак равно{бп≤п≤Nиначе.{\ displaystyle h = \ sum _ {i = 0} ^ {N} b_ {i} \ cdot \ delta = {\ begin {cases} b_ {n} & 0 \ leq n \ leq N \ \ 0 & {\ text {else}}. \ End {case}}}
Если КИХ-фильтр не является причинно-следственным, диапазон ненулевых значений в его импульсной характеристике может начаться раньше , с соответствующим обобщением определяющей формулы.пзнак равно{\ displaystyle n = 0}
Частотный отклик
Влияние фильтра на последовательность описывается в частотной области теоремой свертки Иксп{\ Displaystyle х }
- F{Икс*час}⏟Y(ω)знак равноF{Икс}⏟Икс(ω)⋅F{час}⏟ЧАС(ω){\ displaystyle \ underbrace {{\ mathcal {F}} \ {x * h \}} _ {Y (\ omega)} = \ underbrace {{\ mathcal {F}} \ {x \}} _ {X ( \ omega)} \ cdot \ underbrace {{\ mathcal {F}} \ {h \}} _ {H (\ omega)}} а также упзнак равноИксп*часпзнак равноF-1{Икс(ω)⋅ЧАС(ω)},{\ displaystyle y = x * час = {\ mathcal {F}} ^ {- 1} {\ big \ {} X (\ omega) \ cdot H (\ omega) {\ большой \}},}
где операторы и соответственно обозначают преобразование Фурье с дискретным временем (ДВПФ) и его обратное. Следовательно, комплексная мультипликативная функция — это частотная характеристика фильтра . Он определяется рядом Фурье F{\ displaystyle {\ mathcal {F}}}F-1{\ Displaystyle {\ mathcal {F}} ^ {- 1}}ЧАС(ω){\ Displaystyle H (\ omega)}
![Бесконечный импульсный отклик содержание а также реализация и дизайн [ править ]](https://fuzeservers.ru/wp-content/uploads/d/4/6/d46a1c4e8eba06bae31e518938bf3450.jpeg)
- ЧАС2π(ω) ≜∑пзнак равно-∞∞часп⋅(еяω)-пзнак равно∑пзнак равноNбп⋅(еяω)-п,{\ Displaystyle Н_ {2 \ пи} (\ омега) \ \ треугольник \ сумма _ {п = — \ infty} ^ {\ infty} ч \ cdot \ left ({е ^ {я \ омега}} \ справа) ^ {- n} = \ sum _ {n = 0} ^ {N} b_ {n} \ cdot \ left ({e ^ {i \ omega}} \ right) ^ {- n},}
где добавленный индекс означает 2π-периодичность. Здесь представлена частота в нормализованных единицах ( радианы / отсчет ). Замена, одобренная многими программами проектирования фильтров, изменяет единицы частоты на циклы / отсчет, а периодичность на 1. Когда последовательность x имеет известную частоту дискретизации, отсчетов / секунду , замена изменяет единицы частоты на циклов в секунду ( герц ) и периодичность . Значение соответствует частоте в Гц циклов / отсчет , которая является частотой Найквиста .
ω{\ displaystyle \ omega}ωзнак равно2πж,{\ Displaystyle \ omega = 2 \ пи е,}(ж){\ displaystyle (f)}жs{\ displaystyle f_ {s}} ωзнак равно2πжжs{\ displaystyle \ omega = 2 \ pi f / f_ {s}}(ж){\ displaystyle (f)}жs.{\ displaystyle f_ {s}.}ωзнак равноπ{\ displaystyle \ omega = \ pi}жзнак равножs2{\ displaystyle f = {\ tfrac {f_ {s}} {2}}} знак равно12{\ displaystyle = {\ tfrac {1} {2}}}
ЧАС2π(ω){\ displaystyle H_ {2 \ pi} (\ omega)}также может быть выражено через импульсной характеристики фильтра:
- ЧАС^(z) ≜∑пзнак равно-∞∞часп⋅z-п.{\ displaystyle {\ widehat {H}} (z) \ \ Triangleq \ sum _ {n = — \ infty} ^ {\ infty} h \ cdot z ^ {- n}.}
- ЧАС2π(ω)знак равноЧАС^(z)|zзнак равноеjωзнак равноЧАС^(еjω).{\ displaystyle H_ {2 \ pi} (\ omega) = \ left. {\ widehat {H}} (z) \, \ right | _ {z = e ^ {j \ omega}} = {\ widehat {H }} (e ^ {j \ omega}).}
Свойства [ править ]
КИХ-фильтр имеет ряд полезных свойств, которые иногда делают его предпочтительнее фильтра с бесконечной импульсной характеристикой (БИХ). КИХ-фильтры:
- Не требовать обратной связи. Это означает, что любые ошибки округления не усугубляются суммированием итераций. Одна и та же относительная ошибка возникает в каждом вычислении. Это также упрощает реализацию.
- По своей сути стабильны , так как выход представляет собой сумму конечного числа конечных кратных входных значений, поэтому не может быть больше, чем раз наибольшее значение, появляющееся во входных данных.∑|бя|{\ textstyle \ sum | b_ {i} |}
- Может быть легко сконструирован с линейной фазой , сделав последовательность коэффициентов симметричной. Это свойство иногда требуется для приложений, чувствительных к фазе, например, для передачи данных, сейсмологии , фильтров кроссовера и мастеринга .
Основным недостатком КИХ-фильтров является то, что требуется значительно большая вычислительная мощность в процессоре общего назначения по сравнению с БИХ-фильтром с аналогичной резкостью или селективностью , особенно когда необходимы низкочастотные (относительно частоты дискретизации) срезающие. Однако многие процессоры цифровых сигналов предоставляют специализированные аппаратные функции, позволяющие сделать КИХ-фильтры примерно такими же эффективными, как БИХ-фильтры для многих приложений.
Приложения [ править ]
В электронике этот стимул был бы входным сигналом. В слышимом диапазоне это обычно относится к электронным усилителям , микрофонам и громкоговорителям . Частотная характеристика радиочастотного спектра может относиться к измерениям коаксиального кабеля , кабеля с витой парой , оборудования для коммутации видео , устройств беспроводной связи и антенных систем. Инфразвуковые измерения частотной характеристики включают землетрясения и электроэнцефалографию (мозговые волны).
Требования к частотной характеристике различаются в зависимости от приложения. В аудио высокого качества усилителю требуется частотная характеристика не менее 20–20 000 Гц с допуском не более ± 0,1 дБ в средних частотах около 1000 Гц, однако в телефонии частотная характеристика составляет 400–4000 Гц, с допуском ± 1 дБ достаточно для разборчивости речи.
Кривые частотной характеристики часто используются для обозначения точности электронных компонентов или систем. Когда система или компонент воспроизводит все требуемые входные сигналы без выделения или ослабления определенной полосы частот, система или компонент называется «плоской» или имеет плоскую кривую частотной характеристики. В противном случае можно использовать 3D-форму АЧХ поверхности.
После измерения частотной характеристики (например, импульсной характеристики) при условии, что система является линейной и не зависит от времени , ее характеристика может быть аппроксимирована с произвольной точностью с помощью цифрового фильтра . Точно так же, если система демонстрирует плохую частотную характеристику, цифровой или аналоговый фильтр может быть применен к сигналам до их воспроизведения, чтобы компенсировать эти недостатки.
Форма частотной характеристики очень важна для защиты от помех радаров, систем связи и других систем.
Обзор
Определяющими свойствами для любой линейной стационарной системы являются линейность и стационарность:
Линейность означает, что связь между входом и выходом системы удовлетворяет свойству. Формально, линейной называется система, обладающая следующим свойством: если сигнал на входе системы —
- тогда сигнал на выходе системы —
- для любых постоянных A и B, где — выход системы как реакция на входной сигнал .
Стационарность — означает, что выходной сигнал системы как реакция на любой заданный входной сигнал одинаков для любого момента приложения входного сигнала (с точностью до времени запаздывания момента приложения входного сигнала). В более узком смысле — при запаздывании входного сигнала по времени на некоторую величину, выходной сигнал будет запаздывать на ту же самую величину.
Динамика систем, обладающих вышеперечисленными свойствами, может описываться одной простой функцией, к примеру, импульсной переходной функцией. Выход системы может рассчитываться как свёртка входного сигнала с импульсной переходной функцией системы. Этот метод анализа иногда называется анализом во временной области. Сказанное справедливо и для дискретных систем.
Файл:LTI.png
320px
Кроме того, любая ЛСС может быть описана в частотной области с помощью своей передаточной функции, которая является преобразование Лапласа импульсной передаточной функции (или Z-преобразованием в случае дискретных систем). В силу свойств этих преобразований, выход системы в частотной области будет равен произведению передаточной функции и соответсвующего преобразования входного сигнала. Другими словами, свёртке во временной области соответсвует умножение в частотной области.
Для всех ЛСС собственные функции являются комлексными экспонентами. То есть, если вход системы представляет собой комплексный сигнал с некоторой комплексной амплитудой и частотой , то выход будет равен некоторому сигналу с комплексной амплитудой . Отношение будет являться передаточной функцией системы на частоте .
Так как синусоиды представляют собой сумму компелксных экспонент с комплексно-сопряжёнными частотами, если вход системы — синусоида, то выходом системы будет также синусоида, в общем случае с другой амплитудой и фазой, но с той же частотой.
Теория ЛСС хорошо подходит для описания многих систем. Большинство ЛСС гораздо проще анализировать, чем нестационарные и нелинейные системы. Любая система, динамика которой описывается линейным дифференциальным уравнением с постоянными коэффициентами, является линейной стационарной системой. Примерами таких систем являются электрические схемы, собранные из резисторов, конденсаторов и катушек индуктивности (RLC-цепочки). Груз на пружинке также можно считать ЛСС.
Большая часть общих концепций ЛСС схожа как в случае непрерывных систем, так и в случае дискретных систем.
Неминимальная фаза
Причинные и стабильные системы, инверсии которых являются причинными и нестабильными, известны как системы неминимально-фазовые . Данная система с неминимальной фазой будет иметь больший вклад фазы, чем система с минимальной фазой с эквивалентной амплитудной характеристикой.
Максимальная фаза
Система с максимальной фазой противоположна системе с минимальной фазой. Причинная и устойчивая система LTI — это система с максимальной фазой , если ее инверсия является причинной и нестабильной. Это,
- Нули системы с дискретным временем находятся вне единичной окружности .
- Нули системы непрерывного времени находятся в правой части комплексной плоскости .
Такая система называется системой с максимальной фазой, потому что она имеет максимальную групповую задержку для набора систем, которые имеют одинаковую амплитудно-частотную характеристику. В этом наборе систем с равной амплитудой отклика система с максимальной фазой будет иметь максимальную задержку по энергии.
Например, две системы LTI с непрерывным временем, описываемые передаточными функциями
- s + 10 s + 5 а также s — 10 s + 5 {\ displaystyle {\ frac {s + 10} {s + 5}} \ qquad {\ text {and}} \ qquad {\ frac {s-10} {s + 5}}}
иметь ответы эквивалентной величины; однако вторая система дает гораздо больший вклад в фазовый сдвиг. Следовательно, в этом наборе вторая система является системой с максимальной фазой, а первая система является системой с минимальной фазой. Эти системы также известны как системы с неминимальной фазой, которые вызывают много проблем со стабильностью управления. Одним из недавних решений этих систем является перемещение нулей RHP в LHP с помощью метода PFCD.
Смешанная фаза
В смешанной фазовой системе одни нули находятся внутри единичной окружности, а другие — вне единичной окружности . Таким образом, его групповая задержка не является ни минимальной, ни максимальной, а находится где-то между групповой задержкой системы минимального и максимального фазового эквивалента.
Например, система LTI с непрерывным временем, описываемая передаточной функцией
- ( s + 1 ) ( s — 5 ) ( s + 10 ) ( s + 2 ) ( s + 4 ) ( s + 6 ) {\ Displaystyle {\ гидроразрыва {(s + 1) (s-5) (s + 10)} {(s + 2) (s + 4) (s + 6)}}}
стабильно и причинно; однако у него есть нули как в левой, так и в правой частях комплексной плоскости . Следовательно, это смешанная фазовая система. Для управления передаточными функциями, которые включают в себя эти системы, предлагаются некоторые методы, такие как внутренний модельный контроллер (IMC), обобщенный предсказатель Смита (GSP) и параллельное упреждающее управление с производной (PFCD).
Линейная фаза
Линейно-фазовая система имеет постоянную групповую задержку . Нетривиальные линейные фазовые или почти линейные фазовые системы также являются смешанными фазами.
Практическое применение [ править ]
В практических системах невозможно создать идеальный импульс для использования в качестве входных данных для тестирования; поэтому короткий импульс иногда используется как приближение к импульсу. При условии, что импульс достаточно короткий по сравнению с импульсной характеристикой, результат будет близок к истинной теоретической импульсной характеристике. Однако во многих системах управление очень коротким сильным импульсом может перевести систему в нелинейный режим, поэтому вместо этого система приводится в действие с помощью псевдослучайной последовательности, а импульсная характеристика вычисляется по входным и выходным сигналам.
Громкоговорители
Приложение, которое демонстрирует эту идею, было разработкой тестирования громкоговорителей с импульсной характеристикой в 1970-х годах. Громкоговорители страдают неточностью фазы, что является дефектом в отличие от других измеряемых характеристик, таких как частотная характеристика . Неточность фазы вызвана (слегка) задержанными частотами / октавами, которые в основном являются результатом пассивных кроссоверов (особенно фильтров более высокого порядка), но также вызваны резонансом, накоплением энергии в конусе, внутреннем объеме или вибрацией панелей корпуса. Измерение импульсной характеристики, которая является прямым графиком этого «размытия во времени», предоставило инструмент для уменьшения резонансов за счет использования улучшенных материалов для диффузоров и корпусов, а также внесения изменений в кроссовер громкоговорителей. Необходимость ограничить входную амплитуду для поддержания линейности системы привела к использованию входных данных, таких как псевдослучайные последовательности максимальной длины , и к использованию компьютерной обработки для получения импульсной характеристики.
Электронная обработка править
Анализ импульсной характеристики является основным аспектом радаров , ультразвуковой визуализации и многих областей цифровой обработки сигналов . Интересным примером может служить широкополосное подключение к Интернету. Услуги DSL / широкополосной связи используют методы адаптивной коррекции , чтобы помочь компенсировать искажение сигнала и помехи, создаваемые медными телефонными линиями, используемыми для предоставления услуги.
Системы управления править
В теории управления импульсная характеристика — это реакция системы на ввод дельты Дирака . Это оказывается полезным при анализе динамических систем ; преобразование Лапласа дельта — функции равно 1, так что импульсный отклик эквивалентно обратного преобразования Лапласа из системы передаточной функции .
Акустические и звуковые приложения править
В акустических и звуковых приложениях импульсные характеристики позволяют уловить акустические характеристики помещения, например концертного зала. Доступны различные пакеты, содержащие импульсные характеристики из определенных мест, от маленьких комнат до больших концертных залов. Эти импульсные характеристики затем можно использовать в приложениях сверточной реверберации, чтобы акустические характеристики конкретного места можно было применить к целевому звуку.
Экономика править
В экономике , и особенно в современном макроэкономическом моделировании , функции импульсного отклика используются для описания того, как экономика реагирует с течением времени на экзогенные импульсы, которые экономисты обычно называют шоками , и часто моделируются в контексте векторной авторегрессии . Импульсы, которые часто рассматриваются как экзогенные с макроэкономической точки зрения, включают изменения в государственных расходах , налоговых ставках и других параметрах налогово-бюджетной политики ; изменения денежной базы или других параметров денежно-кредитной политики ; изменения в производительности или другиетехнологические параметры; и изменения в предпочтениях , таких как степень нетерпения . Функции импульсной реакции описывают реакцию эндогенных макроэкономических переменных, таких как объем производства , потребление , инвестиции и занятость, во время шока и в последующие моменты времени. Недавно в литературе были предложены функции асимметричного импульсного отклика, которые отделяют воздействие положительного шока от отрицательного.
Модель многолучевого канала связи
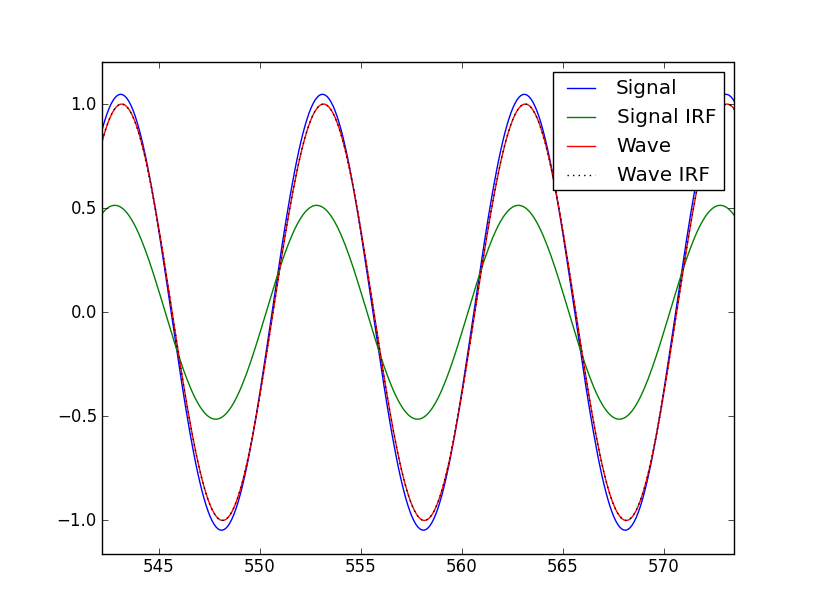
До этого момента мы рассматривали ситуацию, когда канал связи не вносил линейных искажений, однако реальные каналы ведут себя гораздо сложнее, чем простой канал с белым гауссовским шумом. Если канал связи является многолучевым, то возникают замирания сигнала.
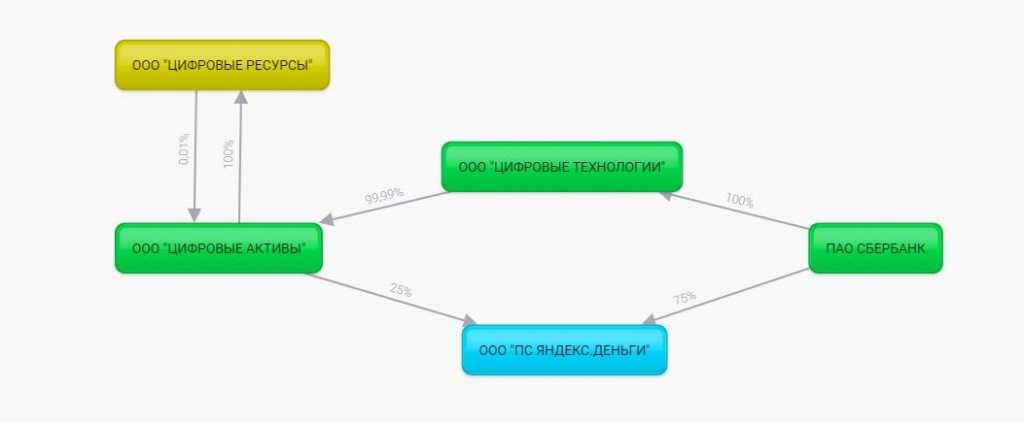
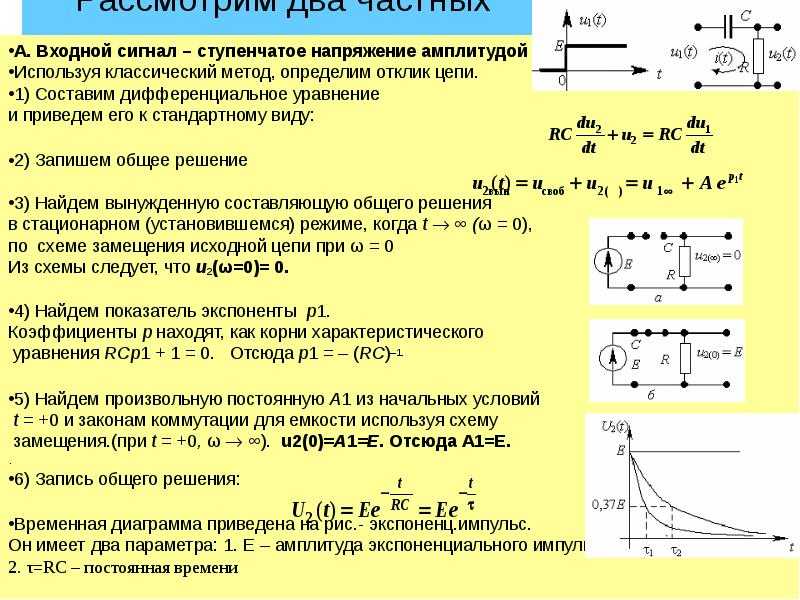
Рассмотрим модель многолучевого канала связи, представленного ниже. Модель включает в себя 4 луча. Сигнал в каждом луче проделывает разный путь и соответственно испытывает разную задержку распространения. Это приводит к тому, что фазы сигналов в точке приема отличается друг от друга, из-за чего возникают замирания – изменение амплитуды и фазы сигнала.
![Бесконечный импульсный отклик содержание а также реализация и дизайн [ править ]](https://fuzeservers.ru/wp-content/uploads/a/7/1/a7158b81b52085cbd181274d143cc13a.jpeg)

![]()
Допустим время распространения сигналов s1(t), s2(t), s3(t) и s4(t) составляет Δt1, Δt2, Δt3 и Δt4 соответственно, и при этом Δt3 < Δt1 < Δt2 < Δt4. Каждый сигнал испытывает ослабление в Kn раз.
Так как сигнал s3(t) прошел самый короткий путь и меньше всего задержался, по сравнению с остальными, возьмем его за основу и определим задержку остальных сигналов относительно сигнала s3(t):
- Δt1 = ΔT1 + Δt3
- Δt2 = ΔT2 + Δt3
- Δt4 = ΔT4 + Δt3
Тогда модель такого канал связи можно представить следующей структурой:
![]()
Модель многолучевого канала, представленная выше, является ничем иным как структурой фильтра! Такая модель многолучевого канала связи называется дискретно-временной. Вспомните из дисциплины «Цифровая обработка сигналов» как выглядела структура КИХ фильтра:
![]()
Из этого можно сделать вывод, что многолучевой канал связи можно представить как фильтр. А так как это фильтр, он будет также вносить межсимвольные искажения. И если межсимвольные искажения, вносимые формирующим фильтром передатчика, мы научились успешно устранять, применяя фильтры «корень из приподнятого косинуса», то МСИ канала связи нельзя скомпенсировать обычным фильтром.
Дело в том, что характеристики канала являются нестационарными, т.е. они изменяются во времени, а следовательно, характеристики компенсирующего фильтра также должны адаптивно изменяться, подстраиваясь под характеристики канала. Таким адаптивным фильтром является эквалайзер.
Вывод передаточной функции [ править ]
Цифровые фильтры часто описываются и реализуются в терминах разностного уравнения, которое определяет, как выходной сигнал соотносится с входным сигналом:
- yпзнак равно1а(бИксп+б1Иксп-1+⋯+бпИксп-п-а1yп-1-а2yп-2-⋯-аQyп-Q){\ displaystyle {\ begin {align} y {} = & {\ frac {1} {a_ {0}}} (b_ {0} x + b_ {1} x + \ cdots + b_ {P} x \\ & {} — a_ {1} y -a_ {2} y — \ cdots -a_ {Q} y ) \ end {выровнен}}}
где:
- п{\ Displaystyle \ P} это порядок фильтра с прямой связью
- бя{\ displaystyle \ b_ {i}} коэффициенты прямого фильтра
- Q{\ displaystyle \ Q} это порядок фильтра обратной связи
- ая{\ displaystyle \ a_ {i}} коэффициенты фильтра обратной связи
- Иксп{\ Displaystyle \ х } входной сигнал
- yп{\ Displaystyle \ у } выходной сигнал.
Более сжатая форма разностного уравнения:
- yпзнак равно1а(∑язнак равнопбяИксп-я-∑jзнак равно1Qаjyп-j){\displaystyle \ y={\frac {1}{a_{0}}}\left(\sum _{i=0}^{P}b_{i}x-\sum _{j=1}^{Q}a_{j}y\right)}
который при перестановке становится:
- ∑j=Qajyn−j=∑i=Pbixn−i{\displaystyle \ \sum _{j=0}^{Q}a_{j}y=\sum _{i=0}^{P}b_{i}x}
Чтобы найти передаточную функцию фильтра, мы сначала используем Z-преобразование каждой стороны приведенного выше уравнения, где мы используем свойство чтобы получить:
- ∑j=Qajz−jY(z)=∑i=Pbiz−iX(z){\displaystyle \ \sum _{j=0}^{Q}a_{j}z^{-j}Y(z)=\sum _{i=0}^{P}b_{i}z^{-i}X(z)}
Мы определяем передаточную функцию как:
- H(z)=Y(z)X(z)=∑i=Pbiz−i∑j=Qajz−j{\displaystyle {\begin{aligned}H(z)&={\frac {Y(z)}{X(z)}}\\&={\frac {\sum _{i=0}^{P}b_{i}z^{-i}}{\sum _{j=0}^{Q}a_{j}z^{-j}}}\end{aligned}}}
Учитывая, что в большинстве конструкций БИХ-фильтров коэффициент равен 1, передаточная функция БИХ-фильтра принимает более традиционную форму: a{\displaystyle \ a_{0}}
- H(z)=∑i=Pbiz−i1+∑j=1Qajz−j{\displaystyle H(z)={\frac {\sum _{i=0}^{P}b_{i}z^{-i}}{1+\sum _{j=1}^{Q}a_{j}z^{-j}}}}
Пример блок-схемы БИХ-фильтра. Блок представляет собой блок задержки.z−1{\displaystyle z^{-1}}





