
Содержание:
В семантический шум Это один из видов шума при общении, при котором говорящий использует сложный технический, родной или грамматический язык, а человек, который его получает, не понимает сказанное сообщение.
Это происходит, когда отправитель использует слово или фразу, значение которой неизвестно, или используется иначе, чем получатель. Например, например, на вывеске в баре с надписью «пить запрещено» может возникать семантический шум. Такой знак можно истолковать как указание на то, что пить вообще нельзя или пить нельзя.
![]()
В свою очередь, это термин, который используют учителя общения и языка для описания того, что происходит, когда слова означают разные вещи для разных людей. Это означает, что понимание сообщения или его декодирование становится более сложным для получателя.
Эффективное общение зависит от человека, который его излучает, и человека, который его получает, зная одно и то же значение рассматриваемой вещи или предмета и семантического шума.
То есть сложности, технические слова или сленг должны быть сведены к минимуму. Мнения, убеждения, отношения и ценности выражаются через язык, который мы используем прямо или косвенно.
В языке слова со временем претерпевают изменения в значениях выражений. Данное слово может относиться к определенной вещи, а затем обобщаться для обозначения других подобных вещей.
Реализация в Arduino
В среде Ардуино общение с UART происходит с помощью класса Serial. Рассмотрим некоторые функции этого класса. Serial.begin(long); Запускает работу порта с заданной в параметре скоростью в бодах. У Меги 4 порта, запускаются командами эc номером, например, Serial1.begin(9600); и так далее. Все остальные команды к портам Меги тоже осуществляются с уточнением номера порта. Serial.end(); Останавливает работу порта, если он был ранее запущен. На практике используется редко, но бывают случаи, когда необходимо освободить пины 0 и 1 хотя бы на время. = Serial.available(); Возвращает в виде числа int количество принятых в буфер порта байт. Если возвращает 0, информации не поступало. Обычно используется как триггер для приема информации. = Serial.read(); Возвращает байт из буфера приема. Следующий вызов возвращает следующий байт и так далее. Если буфер опустел, возвращает 0xFFFF. Serial.print(xxx); Предоставляет большое разнообразие вариантов передачи данных в порт, от байта до строки символов и числа с плавающей точкой. Очень удобная функция для отладки программ. Serial.println(xxx); Отличается от вышеупомянутой автоматической отправкой двух служебных символов переноса строки после информации из входящей в параметр информации. Следующее сообщение начнется с новой строки. Serial.write(xxx); Передает двоичные данные в порт. Возвращает число переданных байтов. = Serial.read(); Возвращает принятые двоичные данные. Список функций класса Serial далеко не полный, но с их помощью можно осуществлять почти любые операции с обменом данных. Посмотрим, как это делается на нескольких практических примерах.
Некоторые примеры семантического шума
Наиболее распространенные примеры, которые можно наблюдать, имеют место в области коммуникации и рекламы.
В одном конкретном случае копирайтер написал такой слоган для кампании по борьбе с наркотиками: «Попробуйте наш сироп от кашля. Тебе никогда не станет лучше ».
Сообщение можно понять двояко, поскольку оно создает семантический шум, и те, кто его читает, могут задаться вопросом, купят ли они продукт, который не поможет им улучшить свое здоровье.
Существует множество примеров семантического шума, и все они зависят от страны, например, в случае сигнала о пожаре в венском отеле, в котором на пожарном знаке указано: «В случае пожара сделайте все возможное, чтобы предупредить швейцара отеля».
Конечно, это крайние примеры. Однако они показывают, что даже если говорящий пытается сказать одно, слова можно понять по другому.
Даже такая простая вещь, как написание слова «содовая», когда люди обычно говорят «содовая», может остановиться на достаточно долгое время, чтобы человек запутался в значении.
Пример интерфейса UART
Этот пример демонстрирует взаимодействие ESP8266 UART с MAX232. Микросхема MAX232 питается от источника 5 В, и включает в себя генератор емкостного напряжения для управления напряжением 232 уровня. Она поставляется с двумя передатчиками, также называемыми драйвером (Tin, Tout) и приемниками (Rin и Rout).
![]()
Здесь использовался ESP8266 (32-битный микроконтроллер) со встроенным UART. Связь может осуществляться с ESP8266 с использованием AT-команд через преобразователь уровня RS232 в TTL (MAX232). На схеме показано подключение ESP8266 к компьютеру.
![]()
Запрашивая действительные AT-команды через ПК, микросхема Wi-Fi ответит подтверждением. Вот шаги для реализации последовательной связи с ПК.
- Подключить передатчик (TX) ESP8266 к приемнику (RX) преобразователя уровня RS232 в TTL (MAX232) и приемника ПК.
- Подключить приемник (RX) ESP8266 к TX ПК и RX преобразователя TTL.
Bin файл для «HelloWorld»
Теперь необходимо получить bin-файл для программы, которую будем прошивать в Flash. Как это сделать, написано в статье Загрузка программы в ОЗУ и запуск через UART, «Получение bin файла»:
-
открыть проект «HelloWorld»;
-
в настройках проекта выбрать в Options — User;
-
найти пункт AfterBuild/Rebuild;
-
поставить галочку в опции Run #1;
-
дописать: $K\ARM\ARMCC\bin\fromelf.exe —bin —output=@L.bin !L
-
пересобрать проект («F7»);
-
в папке проекта найти файл «HelloWorld.bin».
Перед запуском «прошивателя» сотрем Flash память и убедимся, что в памяти пусто. В меню выбираем Flash — Erase. Для того чтобы данная операция отработала, к демо-плате должен быть подключен программатор в Jtag_B, переключатели Mode должны быть в режиме «000» и должно быть подано питание. Без установленного соединения, данный пункт меню не активен.
Увеличить фото
Рисунок 1 — Keil, меню «Flash»
Теперь можно нажать Reset или выключить-включить питание, чтобы убедиться, что светодиод не мигает. После работы «прошивателя», Reset и подача питания должны будут приводить к миганию светодиодом.
Области применения протокола
Последовательный порт отладки использует драйвер UART для печати данных, поступающих извне. Можем использовать этот протокол для отправки и получения команд на встроенные устройства и от них. Также выполняется связь в GPS, модеме GSM / GPRS, чипах Wi-Fi и других модулях работающих с UART. Используется в доступе к мэйнфрейму для подключения разных компьютеров.
Форум по обсуждению материала UART ПРОТОКОЛ: ОПИСАНИЕ РАБОТЫ
|
|
||
|
|
Возможности и характеристики
Как вы, наверное, знаете, базовая система UART обеспечивает надежную, среднескоростную, полнодуплексную связь только с тремя сигналами: Tx (последовательно передаваемые данные), Rx (последовательно принимаемые данные) и земля. В отличие от других протоколов, таких как SPI и I2C, в нем не требуется никаких сигналов синхронизации, так как пользователь дает аппаратному обеспечению UART необходимую для синхронизации информацию.
![]() Связь двух микроконтроллеров через UART
Связь двух микроконтроллеров через UART
На самом деле, сигнал синхронизации существует, но он не передается от одного устройства связи к другому; и приемник, и передатчик имеют внутренние тактовые сигналы, которые управляют тем, как изменение логических уровней генерируется (на стороне Tx) и интерпретируется (на стороне Rx). Неудивительно, что связь через UART не работает, если передатчик и приемник настроены на разные частоты передачи данных. Кроме того, внутренние тактовые сигналы должны быть:
- достаточно точны и близки к ожидаемой частоте;
- достаточно стабильны в течение долгого времени и изменений температуры.
Ключевые термины
Давайте рассмотрим некоторые термины и попутно характеристики UART:
- Стартовый бит
- Первый бит в передаче одного байта через UART. Он указывает на то, что линия данных покидает состояние ожидания. В состоянии ожидания, как правило, на линии установлен высокий логический уровень, поэтому стартовый бит равен низкому логическому уровню. Стартовый бит является вспомогательным, это означает, что он обеспечивает связь между приемником и передатчиком, но не передает значимых данных.
- Стоповый бит
- Последний бит в передаче одного байта через UART. Его логический уровень равен логическому уровню в состоянии ожидания, то есть, логической единице. Это еще один вспомогательный бит.
 Стартовый и стоповый биты в передаче байта через UART
Стартовый и стоповый биты в передаче байта через UART - Битовая скорость
- Приблизительная скорость (в битах в секунду, или бит/с, bps), с которой данные могут быть переданы. Более точное определение частоты (в бит/с) соответствует времени (в секундах), необходимому для передачи одного бита цифровых данных. Например, для системы 9600 бит/с, для передачи одного бита требуется 1/(9600 бит/с) ≈ 104,2 мкс. Эта система не может на самом деле передавать 9600 бит значимых данных в секунду, так как требуется дополнительное время для передачи служебных битов и, возможно, для задержек между передачами отдельных байтов.
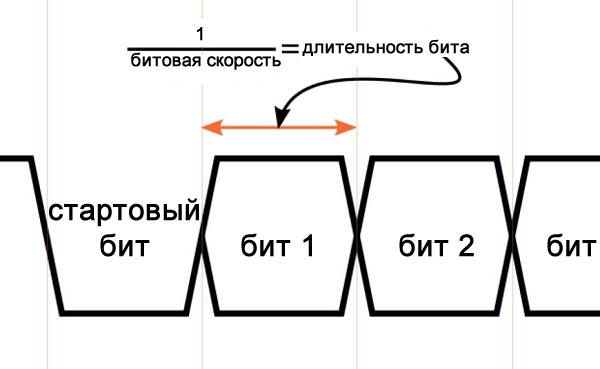 Битовая скорость и время передачи одного бита через UART
Битовая скорость и время передачи одного бита через UART - Бит четности
- Бит обнаружения ошибок, добавленный к концу байта. Возможны два типа: «нечетность» означает, что бит четности будет равен логической 1, если байт данных содержит четное количество битов, равных логической 1, и «четность» означает, что бит четности будет равен логической 1, если байт данных содержит нечетное количество битов, равных логической 1. Это может показаться нелогичным, но идея состоит в том, что бит четности гарантирует, что количество битов, равных логической 1, всегда будет нечетным (для нечетности) или четным (для четности). Поэтому, если вы используете четность, и байт имеет три бита, равных логической 1, то общее количество битов, равных логической 1 в переданных данных, (то есть, сам байт плюс бит четности) будет четным.
Принудительно приводя количество битов, равных логической единице, к четному (при четности) или нечетному (при нечетности) количеству, бит четности обеспечивает грубый механизм обнаружения ошибок – если где-то в процессе передачи какой-либо бит будет перевернут, то количество битов, равных логической 1, не совпадет с выбранным режимом четности. Конечно, этот метод не поможет, если будут перевернуты значения сразу двух битов, поэтому бит четности не так уж и надежен. Если вам действительно нужна устойчивая к ошибкам связь, я бы рекомендовал использовать CRC.
USARTS
![]()
USART — это модификация UART. Расшифровывается как Universal Synchronous/Asynchronous Receiver/Transmitter. При этом добавляется дополнительных три провода: CLOCK, CLEAR TO SEND (CTS), READY TO SEND (RTS).
С помощью такой добавки устраняется необходимость иметь на обоих устройствах точные часы (с рассинхроном не более 5%), а также необходимость и приемнику, и передатчику устанавливать одну и ту же скорость передачи данных. В USART сигнал от CLOCK используется для синхронизации двух устройств. Передающая сторона выдаёт прямоугольные импульсы с частотой, соответствующей скорости передачи данных. А принимающая использует эти импульсы, чтобы правильно принять данные.Clock-сигнал был довольно обычен несколько десятков лет назад, когда связь осуществлялась с помощью модемов. Этого сигнала, кстати, не было в 9-пиновом разъёме RS-232, которые появились на IBM PC в 1984г.
USART также поддерживает ещё два контрольных сигнала: CTS, RTS. Они используются для контроля передачи данных. Например, у получателя может заполниться буфер, в который поступали данные, тогда он выставляет RTS, сообщая, что надо приостановить передачу и подождать пока появится место в буфере.
RTS и CTS соединяются крест-накрест: RTS-CTS, CTS-RTS (показано на схеме выше). Таким образом, производится как бы «обмен рукопожатиями»: когда включен RTS получателя, выключается CTS отправителя и наоборот. Следует использовать USART вместо UART, так как это позволяет проводить обмен рукопожатиями и синхронизировать передачу. В коде это будет означать постоянную проверку CTS значений, либо генерацию прерывания CTS-пином. Кстати, для обратной совместимости USART может быть использован как простой UART с использованием только трёх проводников: RX, TX, Земля.
Эффективные меры профилактики вредного воздействия шума на здоровье работников предприятий
– Как на практике можно минимизировать риски повреждения органов слуха работников шумных производств?– Важными средствами профилактики заболеваний, вызываемых воздействием интенсивного производственного шума, являются индивидуальные средства защиты от шума – противошумы, которые нужно применять в случаях превышения допустимого уровня шума на рабочих местах, а также регламентированное по времени, непродолжительное пребывание рабочего в условиях интенсивного шума по условиям технологии производства.– Какие средства индивидуальной защиты наиболее эффективны?– На практике широко применяются такие индивидуальные средства защиты от шума, как противошумные вкладыши и наушники, а также шлемы. К противошумам предъявляется ряд требований, главными из которых являются: эффективность ослабления шума, удобное и безвредное пользование и соответствие современному конструированию
Однако важно понимать, что применение средств индивидуальной защиты органов слуха связано с известной степенью дискомфорта. Поэтому важно разъяснять работающим, что пользование индивидуальными средствами защиты от шума требует определенного времени на привыкание
Необходимо также помнить о том, что противопоказанием к применению средств индивидуальной защиты от шума (кроме вкладышей «Беруши») являются воспалительные заболевания наружного и среднего уха, кожи лица и головы. Опыт показывает, что успешное внедрение в практику борьбы с неблагоприятным воздействием шума индивидуальной защиты, отвечающей гигиеническим требованиям, резко снижает, а в ряде случаев и исключает риск развития профессиональной нейросенсорной тугоухости.– Какие технологии снижения акустического шума применяются на современных технологических производствах? Какие виды коллективных средств защиты от шума получили распространение?– По отношению к источнику возбуждения шума коллективные средства защиты подразделяются на средства, снижающие шум в источнике его возникновения, и средства, снижающие шум на пути его распространения от источника до защищаемого объекта. Снижение шума в источнике осуществляется за счет улучшения конструкции машины или изменения технологического процесса. Средства, снижающие шум в источнике его возникновения в зависимости от характера шумообразования подразделяются на средства, снижающие шум механического происхождения, аэродинамического и гидродинамического происхождения, электромагнитного происхождения. Методы и средства коллективной защиты в зависимости от способа реализации подразделяются на строительно-акустические, архитектурно-планировочные и организационно-технические и включают изменение направленности излучения шума, рациональную планировку предприятий и производственных помещений, акустическую обработку посещений, применения эффективных звукоизоляционных материалов.
8.3. Методы и средства защиты
Используются следующие методы:
1. Уменьшение шума в источнике.
Этот метод является наиболее рациональным.
Механические шумы снижаются при помощи следующих технических мероприятий:
- замена ударных процессов и механизмов безударными, например, применять оборудование с гидроприводом вместо оборудования с кривошипным и эксцентрированным приводами. Заменяют штамповку прессованием: клепку – сваркой, обрубку – резкой и т.д.;
- применять вместо прямозубых шестерен косозубые;
- замена зубчатых и цепных передач клиноременными;
- замена подшипников качения на подшипники скольжения;
- замена (по возможности) металлических деталей на пластмассовые;
- использование принудительной смазки трущихся поверхностей;
- применять балансировку вращающихся элементов машин.
Аэродинамические шумы
Это шумы вентиляторов, воздуходувок, компрессоров, выпусков пара и воздуха в атмосферу, двигателей внутреннего сгорания.
В большинстве случаев меры по ослаблению аэродинамических шумов в источнике оказываются недостаточными, поэтому дополнительное, а часто и основное снижение шума достигается путем звукоизоляцией источника и установка глушителей.
Гидродинамические шумы
Возникают вследствие стационарных и нестационарных процессов в жидкостях (насосы).
Меры борьбы – это улучшение гидродинамических характеристик насосов и выбор оптимальных режимов их работы.
Электромагнитные шумы – возникают в электрических машинах и оборудовании за счет магнитного поля, обусловленного электрическим током.
Снижение электромагнитного шума осуществляется путем конструктивных изменений в электрических машинах. В трансформаторах необходимо применять более плотную прессовку пакетов, использовать демпфирующие материалы.
2. Изменение направленности излучения шума.
3. Рациональная планировка предприятий и цехов.
4. Акустическая обработка помещений.
5. Если нет возможности уменьшить прямой звук, то для снижения шума нужно уменьшить энергию отраженных волн. Процесс поглощения звука происходит за счет перехода энергии колеблющихся частиц воздуха в теплоту вследствие потерь в порах материала. Поэтому для эффективного звукопоглощения материал должен обладать пористой структурой, причем поры должны быть открыты со стороны падения звука и соединяться между собой, чтобы не препятствовать проникновению звуковой волны в толщу материала.
6. Уменьшение шума на пути его распространения.
Этот метод применяется, когда рассмотренными выше методами не возможно или нецелесообразно достичь требуемого снижения шума.
Снижение шума этим методом может быть осуществлено применением:
а) звукоизолирующих кожухов, экранов, кабин;
б) глушителей шума.
Средства индивидуальной защиты
Часто неэкономично, а иногда практически невозможно уменьшить шум до допустимых величин общетехническими мероприятиями. Поэтому средства индивидуальной защиты являются основными мерами, предотвращающими профессиональные заболевания работающих.
К средствам индивидуальной защиты относятся вкладыши, наушники, шлемы.
Supercat
Большинство ошибок проистекают из трех причин: (1) сгенерированный сигналом передатчик не соответствует действительным данным; (2) сигнал передатчика не был получен как сгенерированный, или (3) приемник не был готов обработать данные, когда они были получены. Самая распространенная причина, по которой я столкнулся с проблемой № 1, — это передатчик, который переконфигурируется или отключается во время передачи данных. Проблема № 2 может легко возникнуть для сигналов, проходящих через «внешний мир», в результате таких вещей, как радиопомехи (мобильные телефоны могут быть на удивление неприятными!), Но, как правило, не должна возникать для сигналов, ограниченных одной платой. Проблема № 3 может возникать из-за того, что слишком много байтов поступает быстрее, чем их можно обработать, или из-за того, что приемник реконфигурирован, выключен или запущен во время передачи.
Во многих случаях трудно полностью устранить все эти проблемы; цель должна состоять в том, чтобы гарантировать, что общий «ущерб», нанесенный ими (вероятность возникновения, количество повреждений на случай), является приемлемо низким. Это проще всего сделать, выбрав пессимистическую оценку надежности, а затем разработав протокол так, чтобы влияние на производительность системы даже самых худших отказов, которые соответствовали оценкам, было в допустимых пределах.
Энди Смит
Чтобы справиться с этими ошибками, вы должны реализовать логический протокол более высокого уровня. что-то похожее на TCP, или проверьте стек OSI для идей.
в основном, две важные части для начала — это контрольные суммы и тайм-ауты. используйте алгоритм для вычисления избыточного значения, которое представляет в меньшей форме содержимое каждого сообщения. затем проверьте это в полученном сообщении. если суммы не совпадают, возможно, вы получили ошибку кадрирования, битовый шум и т. д., и т. д., и вам нужно будет отбросить сообщение и попытаться каким-либо образом восстановить, повторно отправить, сигнал NACK (не подтвержденный) и т. д.
также убедитесь, что тайм-ауты включены в протокол верхнего уровня. если вы получаете какую-то ошибку кадрирования, ваш UART может никогда не восстановиться и снова начать обработку. возможно, он ожидает стоп-бит на кадре, который, как считает отправитель UART, уже отправлен, но был искажен шумом, перекосом тактового сигнала и т. д., что приведет к отправке любого входного кода в бесконечный цикл. убедитесь, что у вас есть разумный предел того, как долго ваши входные данные должны ждать, пока не будет принято решение отказаться от этого сообщения, и снова повторить попытку, NACK, отказаться и т. д.
Последовательное преобразование в параллельное
![]()
Шаг 1: Возьмем 4 триггера. Количество триггеров совпадает с количеством передаваемых битов.
Шаг 2: Сначала отключим параллельную шину. Не включаем пока не будут загружены все биты. Сохраним данные на входе первого триггера. Теперь установим высокий уровень тактовой частоты, это сдвинет младший бит на вход второго триггера и выход первого. Точно так же сдвинем все биты один за другим, сделав тактовый импульс высоким. Преобразователь находится в состоянии удержания до тех пор, пока все биты не будут переданы на выход.
Шаг 3: Теперь каждый триггер содержит один бит последовательных данных. Пока все биты передаются на выход триггера, активируем шину. Это заставит конвертер отправлять все биты за раз.
![]()
Настройка тактирования — Clock.c
Настройка тактирования реализована в файле Clock.c, функция Clock_Init_HSE_PLL(). Данная функция настраивает частоту ядра на работу от генератора HSE c использованием умножителя PLL, который передается во входном параметре. В примере используется максимальный коэффициент умножения PLL_MUL = 16 (main.c).
Код легче понять, если ориентироваться на рисунок 3.
![]()
Увеличить фото
Рисунок 3 — структурная блок-схема формирования тактовой частоты
В основном, код состоит из включения мультиплексоров С1, С2, С3 и PLL. Но есть два важных момента:
-
Выборка команд из EEPROM не может происходить быстрее, чем 25МГц, поэтому необходимо выставлять задержку доступа к EEPROM при работе ядра на больших частотах. Ядро останавливается на время этой задержки, пока считывается очередная порция инструкций. За раз из EEPROM извлекается 16 байт, где может быть закодировано от 4 до 8 инструкций процессора. Установка задержки происходит функцией EEPROM_SetLatency(), при этом предварительно на блок EEPROM подается тактирование.
-
При работе на высоких частотах необходимо регулировать параметры внутреннего регулятора напряжения ядра(LDO). В спецификации это параметры SelectRI и LOW в регистре REG_0E, которые выбираются по частоте ядра и всегда должны быть равны. Раздельное управление этими параметрами возможно, но, согласно спецификации, не рекомендуется. Если используется много периферийных блоков, то случается, что без выставления данных параметров МК сбоит, поэтому рекомендуется выставлять эти параметры всегда — функция SetSelectRI().
В приведенном списке SelectRI присутствует значение RI_Gens_Off. Оно выставляется, когда тактирование снаружи микросхемы задается не резонатором, а внешним генератором. В таком варианте необходимость во внутреннем генераторе отпадает и частота напрямую (режим ByPass) идет на вход схемы тактирования, мультиплексор С1 вход HSE.
Резонатор генерирует синусоидальный сигнал, который далее генератором преобразуется в прямоугольные импульсы.
Концепция семантического шума
Понимание того, что означает семантический шум, поможет вам распознать, когда он возникает, особенно в деловой среде или в образовательной среде, чтобы принять меры предосторожности и избежать его. Хотя невозможно избавиться от переживаний, которые являются частью ценностей и взглядов человека, они также влияют на то, как воспринимается данное сообщение
Хотя невозможно избавиться от переживаний, которые являются частью ценностей и взглядов человека, они также влияют на то, как воспринимается данное сообщение.
Таков пример названия широко известного во всем мире бренда, который претерпел большие изменения в своем значении, например, слово «Kleenex», которое относится к прямоугольной коробке с одноразовыми салфетками, независимо от того, принадлежит ли она указанному бренду или нет. .
Тогда как в других случаях слово может начинаться как общее описание чего-либо, а со временем оно может относиться только к конкретной вещи.
Чтобы стать целенаправленным коммуникатором, который знает, как и когда использовать нужное сообщение в нужное время, необходимо потратить немного времени на языковые навыки и словарный запас.
Наконец, управление языком полностью связано с эффективным общением.
Инструкция по настройке
![]()
- Для настройки протокола вызываем инженерное меню телефона, набрав комбинацию *#3646633#, после чего переходим к следующему меню. Для этого заходим в пункт «Device» > «Set UART» > «UART Setting».
- Мы видим такие пункты, как «PS Config» и «TST Config». Первый пункт отвечает за обмен информацией с ПК по USB-проводу, а второй необходим для отладки ПО, благодаря чему разработчики выявляют неисправности.
- Каждый из пунктов содержит параметры перенаправления потока на устройство (UART 1-3 или USB) и скорость такого потока. Тестовый порт, то есть «TST Config», нам не нужен, и его мы не трогаем.
- Что касается «PS Config», необходимо позаботиться об определённых настройках. Устанавливаем значение «UART1». В драйвере на ПК, как правило, указана скорость потока (к примеру, 115200). Устанавливаем аналогичную скорость для UART1 (или «Auto»).
- Также вместо UART1 можно выставить «USB Port», правда, в этом случае при подключении USB-провода не гарантируется, что режим USB отобразится. Перезагружаем устройство и вновь пробуем соединение.
Скетч
После подготовки и сборки компонентов, мы готовы программировать наши платы. Для этого проекта обе платы будут иметь одинаковые скетчи.
Сначала, мы устанавливаем режим контакта 8 (кнопка) в , режим контакта 13 (светодиод) в и устанавливаем начальное состояние контакта 13 в состояние (светодиод выключен).
Как всегда, Arduino позволяет нам легко использовать встроенное оборудование UART с помощью объекта serial. Последовательный serial объект имеет необходимые функции для простого использования UART-интерфейса Arduino.
Serial.begin()
Для связи через UART-интерфейс необходимо сначала его настроить. Самый простой способ настроить UART Arduino — это использовать функцию . Параметр («Скорость») — это скорость передачи данных, с которой мы хотим запустить UART. С помощью этой функции остальные параметры UART будут установлены на значения по умолчанию:
- Data length = 8 (длина данных)
- Parity bit = 1 (бит четности)
- Number of Stop Bits = None (количество стоп-битов = нет)
Если настройки по умолчанию для вас не работают, используйте функцию вместо . Дополнительный параметров используется для изменения настроек длины блока данных, бита четности, количества стоповых битов. Определенные значения для конфигурирования параметра можно найти здесь.
Нижеприведенный код добавляет внутри для инициализации Arduino Uno UART со скоростью 9600 бит/с и другими параметрами, установленными по умолчанию.
Следующая часть кода — это чтение и сохранение значения, полученного из последовательного интерфейса. Для этого мы будем использовать функцию вместе с оператором , чтобы проверить, не получены ли данные. Затем мы вызовем для получения одного байта полученных данных и сохраним значение в переменную . Значение управляет включением/выключением встроенного светодиода.
Serial.available()
Для проверки наличия данных, ожидающих чтения в буфере UART (или в последовательном интерфейсе), воспользуемся функцией . возвращает количество байт, ожидающих чтения в буфере.
Serial.read()
Для чтения данных, ожидающих в последовательном буфере, будем использовать функцию . Эта функция возвращает один байт данных, считанных из буфера.
Serial.write()
Для отправки данных через контакты Arduino TX0 мы будем использовать функцию . Параметр — это байт (или серия байтов), который будет отправлен.
В нашем скетче мы будем посылать значение в зависимости от состояния контакта 8. Мы отправим значение char ‘1’, если пин 8 HIGH, или значение char ‘0’, если пин 8 LOW.
Синхронизация и выборка
Стандартные цифровые данные бесполезны без какого-либо механизма синхронизации. На рисунке ниже показано почему:
![]() Выборка двоичных данных при приеме через UART
Выборка двоичных данных при приеме через UART
Типовой сигнал данных представляет собой просто напряжение, уровень которого изменяется между состояниями логического нуля и единицы. Приемник может правильно преобразовать эти логические состояния в цифровые данные, только если он знает, когда сделать выборку сигнала. Это может быть легко выполнено с помощью отдельного тактового сигнала – например, передатчик обновляет сигнал данных при каждом нарастающем фронте тактового сигнала, а приемник затем делает выборку данных по каждому заднему фронту.
Однако, как следует из названия «универсальный асинхронный приемник/передатчик», интерфейс UART не использует тактовый сигнал для синхронизации устройств Tx и Rx. Так как же приемник узнает, когда сделать выборку сигнала данных передатчика?
Передатчик формирует битовый поток на основе своего тактового сигнала, а целью приемника является использование своего тактового сигнала для выборки входящих данных в середине каждого битового периода. Выполнение выборки в середине битового периода не является обязательным, но этот момент оптимален, так как выборка ближе к началу или к концу битового периода делает систему менее устойчивой к различиям тактовых частот приемника и передатчика.
Последовательность приемника начинается с заднего фронта стартового бита. Это очень важный момент процесса синхронизации. Внутренний тактовый генератор приемника полностью независим от внутреннего тактового генератора передатчика – другими словами, эта граница спада сигнала может соответствовать любой точке в тактовом сигнале приемника.
![]() Момент прихода стартового бита в приемник UART
Момент прихода стартового бита в приемник UART
Чтобы гарантировать, что активный фронт тактового сигнала приемника будет приходиться примерно на середину битового периода, частота тактового сигнала битовой скорости, переданная в модуль приемника, значительно выше (в 8 или 16, или даже в 32 раза) реальной битовой скорости.
Допустим, что один битовый период соответствует 16 циклам тактового сигнала приемника. В этом случае синхронизация и выборка могут быть выполнены следующим образом:
- процесс приема запускается по границе спада стартового бита;
- приемник ждет в течение 8 циклов тактового сигнала, чтобы установить момент выборки, который находится близко к середине периода бита;
- приемник ждет в течение 16 циклов тактового сигнала, которые приводят его к середине периода первого бита данных;
- первый бит данных оцифровывается и сохраняется в регистре приемника, а затем модуль снова ожидает 16 циклов тактового сигнала перед выборкой второго бита данных;
- этот процесс повторяется до тех пор, пока все биты данных не будут выбраны и сохранены, а затем нарастающий фронт стопового бита возвращает интерфейс UART в режим ожидания.
![]() Выборка данных при приеме через UART
Выборка данных при приеме через UART
Семантический шум как препятствие для эффективного общения
В процессе общения возникают разного рода шумы. Различают психологические, физические, технические и смысловые шумы.
Из всех этих различных типов шума семантика рассматривается некоторыми экспертами как наиболее важная, поскольку, если значение слов или выражений не понимается, сообщение никогда не будет понято получателем.
Если целью является эффективное общение с другими людьми для достижения определенной цели, крайне важно улучшить язык с помощью чтения, чтобы обогатить и укрепить словарный запас и грамматику. Еще один очень положительный вариант — попросить отправителя сообщения «обратная связь», то есть дальнейшее объяснение слова или выражения, которые используются для того, чтобы без проблем понять отправленное сообщение
Еще один очень положительный вариант — попросить отправителя сообщения «обратная связь», то есть дальнейшее объяснение слова или выражения, которые используются для того, чтобы без проблем понять отправленное сообщение.
Вопрос 24—30 Межсетевой экран
Что из нижеперечисленного может делать межсетевой экран (файервол, брандмауер)? (возможны несколько вариантов ответов)
вести журнал всех событий и подозрительной активности, формировать статистику
фильтровать входящий и исходящий трафик
предотвращать попытки несанкционированного доступа к вашей информации
контролировать доступ к вашим устройствам по сети
Кулответ:
- вести журнал всех событий и подозрительной активности, формировать статистику
- фильтровать входящий и исходящий трафик
- предотвращать попытки несанкционированного доступа к вашей информации
- контролировать доступ к вашим устройствам по сети